Hi, I’m Hidetoshi!
I am a researcher who loves building novel signal processing systems using deep learning.
I would like to continue my research in the field of autonomous driving by combining the knowledge of Self-Driving Car Engineer learned at Udacity with my experience of radar system development.
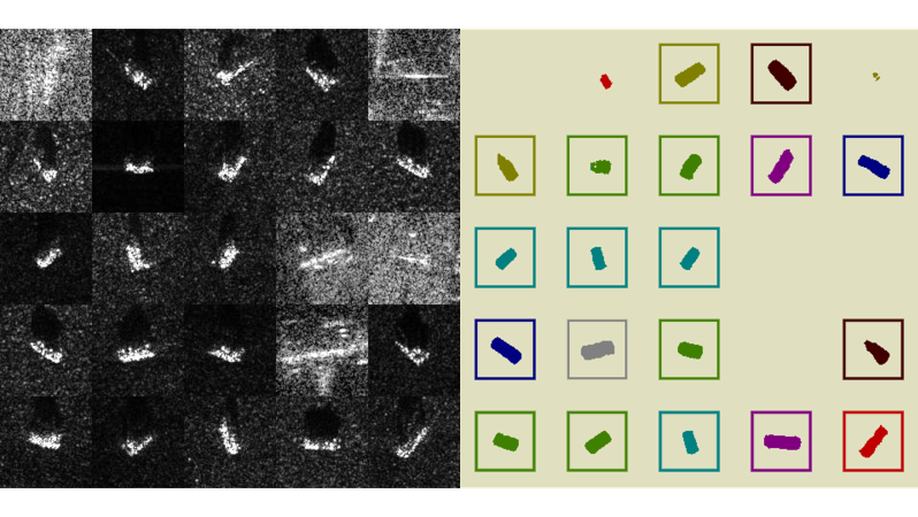
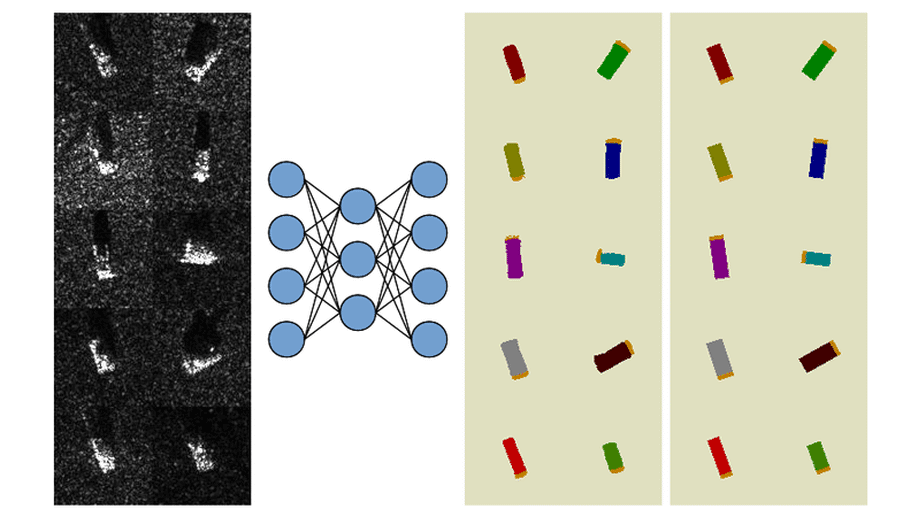
Previously, my lifelong fascination with artificial intelligence and radar led me to become an innovator in research on computer vision for automatic target recognition (ATR) of synthetic aperture radar (SAR).
Interests
- Self-Driving Car
- Deep Learning
- Radar



{kind=link}