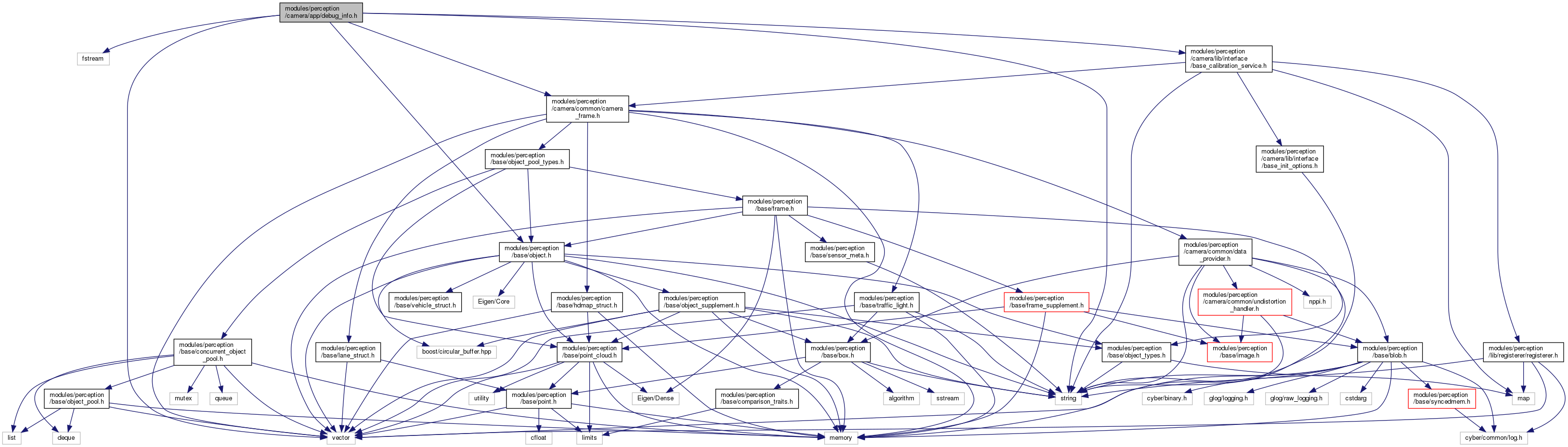
#include <fstream>#include <string>#include <vector>#include "modules/perception/base/object.h"#include "modules/perception/camera/common/camera_frame.h"#include "modules/perception/camera/lib/interface/base_calibration_service.h"
Include dependency graph for debug_info.h:
Go to the source code of this file.
Namespaces | |
| apollo | |
| apollo::perception | |
| apollo::perception::camera | |
Functions | |
| void | apollo::perception::camera::WriteCamera2World (std::ofstream &fout, int frame_num, const Eigen::Affine3d &pose) |
| void | apollo::perception::camera::WriteTracking (std::ofstream &fout, int frame_num, const std::vector< base::ObjectPtr > &tracked_object) |
| int | apollo::perception::camera::WriteDetections (const bool enable, const std::string &out_path, const std::vector< base::ObjectPtr > &objects) |
| int | apollo::perception::camera::WriteDetections (const bool enable, const std::string &out_path, CameraFrame *frame) |
| int | apollo::perception::camera::WriteLanelines (const bool enable, const std::string &save_path, const std::vector< base::LaneLine > &lane_objects) |
| int | apollo::perception::camera::WriteCalibrationOutput (bool enable, const std::string &out_path, const CameraFrame *frame) |
| void | apollo::perception::camera::WriteFusionTracking (std::ofstream &fout, int frame_num, const std::string &camera_name, const std::vector< base::ObjectPtr > &tracked_object) |
