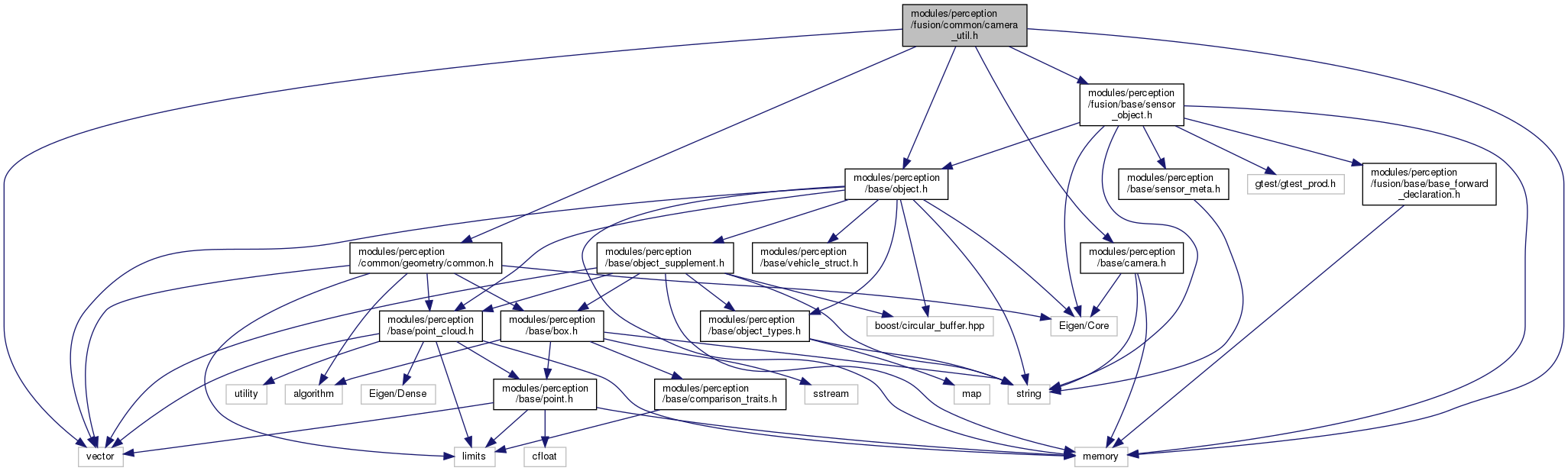
#include <memory>#include <vector>#include "modules/perception/base/camera.h"#include "modules/perception/base/object.h"#include "modules/perception/common/geometry/common.h"#include "modules/perception/fusion/base/sensor_object.h"
Include dependency graph for camera_util.h:
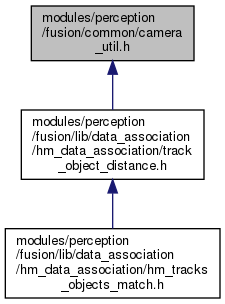
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| apollo | |
| apollo::perception | |
| apollo::perception::fusion | |
Functions | |
| void | apollo::perception::fusion::GetObjectEightVertices (std::shared_ptr< const base::Object > obj, std::vector< Eigen::Vector3d > *vertices) |
| template<typename VectorType > | |
| bool | apollo::perception::fusion::IsPtInFrustum (const VectorType &pt, double width, double height) |
| template<typename Type > | |
| Type | apollo::perception::fusion::CalculateAugmentedIOUBBox (const base::BBox2D< Type > &box1, const base::BBox2D< Type > &box2, const Type &augmented_buffer) |
| bool | apollo::perception::fusion::Pt3dToCamera2d (const Eigen::Vector3d &pt3d, const Eigen::Matrix4d &world2camera_pose, base::BaseCameraModelPtr camera_model, Eigen::Vector2d *pt2d) |
| bool | apollo::perception::fusion::IsObjectEightVerticesAllBehindCamera (const std::shared_ptr< const base::Object > &obj, const Eigen::Matrix4d &world2camera_pose, base::BaseCameraModelPtr camera_model) |
| float | apollo::perception::fusion::ObjectInCameraView (SensorObjectConstPtr sensor_object, base::BaseCameraModelPtr camera_model, const Eigen::Affine3d &camera_sensor2world_pose, double camera_ts, double camera_max_dist, bool motion_compensation, bool all_in) |
