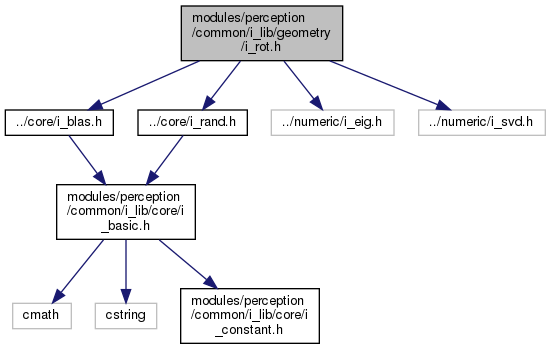
#include "../core/i_blas.h"#include "../core/i_rand.h"#include "../numeric/i_eig.h"#include "../numeric/i_svd.h"
Include dependency graph for i_rot.h:
Go to the source code of this file.
Namespaces | |
| idl | |
Functions | |
| template<typename T > | |
| void | idl::i_force_rot_2x2 (T R[4]) |
| template<typename T > | |
| void | idl::i_rot_orthogonalize (T R[9], int nr_svd_iter=I_DEFAULT_MAX_SVD_ITERATIONS) |
| template<typename T > | |
| void | idl::i_rot_rodrigues_3x3_solver (T sinc, T mcos, T a0_sqr, T a1_sqr, T a2_sqr, const T a[3], T R[9]) |
| template<typename T > | |
| void | idl::i_rot_rodrigues_3x3_solver (T sinc, T mcos, T a0_sqr, T a1_sqr, T a2_sqr, const T s_da[3], const T c_da[3], const T a[3], T R[9], T D[9][3]) |
| template<typename T > | |
| void | idl::i_rot_rodrigues_3x3 (const T a[3], T R[9]) |
| template<typename T > | |
| void | idl::i_rot_rodrigues_3x3 (const T a[3], T R[9], T D[9][3]) |
| template<typename T > | |
| void | idl::i_rot_rodrigues_3x3_slow (const T a[3], T R[9], T D[9][3]) |
| template<typename T > | |
| void | idl::i_rot_invert_rodrigues_3x3 (const T R[9], T v[3], T &theta) |
| template<typename T > | |
| bool | idl::i_rot_3x3 (const T a[3], const T b[3], T R[9]) |
| template<typename T > | |
| void | idl::i_rand_rot_3x3 (T R[9], int &seed, int force_proper=1) |
