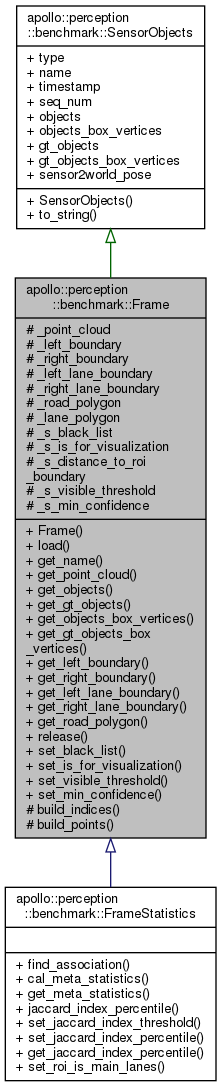
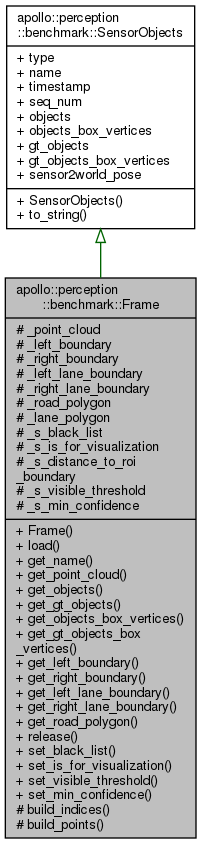
#include <frame.h>
◆ Frame()
| apollo::perception::benchmark::Frame::Frame |
( |
| ) |
|
|
inline |
◆ build_indices()
| void apollo::perception::benchmark::Frame::build_indices |
( |
| ) |
|
|
protected |
◆ build_points()
| void apollo::perception::benchmark::Frame::build_points |
( |
| ) |
|
|
protected |
◆ get_gt_objects()
| const std::vector<ObjectPtr>& apollo::perception::benchmark::Frame::get_gt_objects |
( |
| ) |
const |
|
inline |
◆ get_gt_objects_box_vertices()
| const std::vector<std::vector<Eigen::Vector3d> >& apollo::perception::benchmark::Frame::get_gt_objects_box_vertices |
( |
| ) |
const |
|
inline |
◆ get_left_boundary()
| const std::vector<PointCloud>& apollo::perception::benchmark::Frame::get_left_boundary |
( |
| ) |
const |
|
inline |
◆ get_left_lane_boundary()
| const std::vector<PointCloud>& apollo::perception::benchmark::Frame::get_left_lane_boundary |
( |
| ) |
const |
|
inline |
◆ get_name()
| std::string apollo::perception::benchmark::Frame::get_name |
( |
| ) |
const |
|
inline |
◆ get_objects()
| const std::vector<ObjectPtr>& apollo::perception::benchmark::Frame::get_objects |
( |
| ) |
const |
|
inline |
◆ get_objects_box_vertices()
| const std::vector<std::vector<Eigen::Vector3d> >& apollo::perception::benchmark::Frame::get_objects_box_vertices |
( |
| ) |
const |
|
inline |
◆ get_point_cloud()
◆ get_right_boundary()
| const std::vector<PointCloud>& apollo::perception::benchmark::Frame::get_right_boundary |
( |
| ) |
const |
|
inline |
◆ get_right_lane_boundary()
| const std::vector<PointCloud>& apollo::perception::benchmark::Frame::get_right_lane_boundary |
( |
| ) |
const |
|
inline |
◆ get_road_polygon()
| const std::vector<PointCloud>& apollo::perception::benchmark::Frame::get_road_polygon |
( |
| ) |
const |
|
inline |
◆ load()
| bool apollo::perception::benchmark::Frame::load |
( |
const std::vector< std::string > & |
filenames | ) |
|
◆ release()
| void apollo::perception::benchmark::Frame::release |
( |
void |
| ) |
|
|
inline |
◆ set_black_list()
| static void apollo::perception::benchmark::Frame::set_black_list |
( |
const std::set< std::string > & |
black_list | ) |
|
|
static |
◆ set_is_for_visualization()
| static void apollo::perception::benchmark::Frame::set_is_for_visualization |
( |
bool |
for_visualization | ) |
|
|
static |
◆ set_min_confidence()
| static void apollo::perception::benchmark::Frame::set_min_confidence |
( |
float |
confidence | ) |
|
|
static |
◆ set_visible_threshold()
| static void apollo::perception::benchmark::Frame::set_visible_threshold |
( |
float |
threshold | ) |
|
|
static |
◆ _lane_polygon
| std::vector<PointCloud> apollo::perception::benchmark::Frame::_lane_polygon |
|
protected |
◆ _left_boundary
| std::vector<PointCloud> apollo::perception::benchmark::Frame::_left_boundary |
|
protected |
◆ _left_lane_boundary
| std::vector<PointCloud> apollo::perception::benchmark::Frame::_left_lane_boundary |
|
protected |
◆ _point_cloud
◆ _right_boundary
| std::vector<PointCloud> apollo::perception::benchmark::Frame::_right_boundary |
|
protected |
◆ _right_lane_boundary
| std::vector<PointCloud> apollo::perception::benchmark::Frame::_right_lane_boundary |
|
protected |
◆ _road_polygon
| std::vector<PointCloud> apollo::perception::benchmark::Frame::_road_polygon |
|
protected |
◆ _s_black_list
| std::set<std::string> apollo::perception::benchmark::Frame::_s_black_list |
|
staticprotected |
◆ _s_distance_to_roi_boundary
| float apollo::perception::benchmark::Frame::_s_distance_to_roi_boundary |
|
staticprotected |
◆ _s_is_for_visualization
| bool apollo::perception::benchmark::Frame::_s_is_for_visualization |
|
staticprotected |
◆ _s_min_confidence
| float apollo::perception::benchmark::Frame::_s_min_confidence |
|
staticprotected |
◆ _s_visible_threshold
| float apollo::perception::benchmark::Frame::_s_visible_threshold |
|
staticprotected |
The documentation for this class was generated from the following file:
- modules/perception/tool/benchmark/lidar/base/frame.h
 Protected Member Functions inherited from apollo::perception::benchmark::SensorObjects
Protected Member Functions inherited from apollo::perception::benchmark::SensorObjects