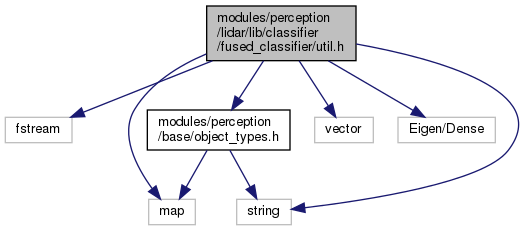
#include <fstream>#include <map>#include <string>#include <vector>#include "Eigen/Dense"#include "modules/perception/base/object_types.h"
Include dependency graph for util.h:
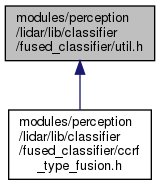
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| apollo | |
| apollo::perception | |
| apollo::perception::lidar | |
| apollo::perception::lidar::util | |
Typedefs | |
| typedef Eigen::Matrix< double, VALID_OBJECT_TYPE, 1 > | apollo::perception::lidar::Vectord |
| typedef Eigen::Matrix< int, VALID_OBJECT_TYPE, 1 > | apollo::perception::lidar::Vectori |
| typedef Eigen::Matrix< double, VALID_OBJECT_TYPE, VALID_OBJECT_TYPE > | apollo::perception::lidar::Matrixd |
Enumerations | |
| enum | { apollo::perception::lidar::VALID_OBJECT_TYPE = static_cast<int>(base::ObjectType::MAX_OBJECT_TYPE) - 2 } |
Functions | |
| void | apollo::perception::lidar::util::FromStdToVector (const std::vector< float > &src_prob, Vectord *dst_prob) |
| void | apollo::perception::lidar::util::FromEigenToVector (const Vectord &src_prob, std::vector< float > *dst_prob) |
| void | apollo::perception::lidar::util::ToLog (Vectord *prob) |
| void | apollo::perception::lidar::util::ToExp (Vectord *prob) |
| void | apollo::perception::lidar::util::ToExpStable (Vectord *prob) |
| void | apollo::perception::lidar::util::Normalize (Vectord *prob) |
| void | apollo::perception::lidar::util::NormalizeRow (Matrixd *prob) |
| bool | apollo::perception::lidar::util::LoadSingleMatrix (std::ifstream &fin, Matrixd *matrix) |
| bool | apollo::perception::lidar::util::LoadSingleMatrixFile (const std::string &filename, Matrixd *matrix) |
| bool | apollo::perception::lidar::util::LoadMultipleMatricesFile (const std::string &filename, std::map< std::string, Matrixd > *matrices) |
