#include <object_supplement.h>
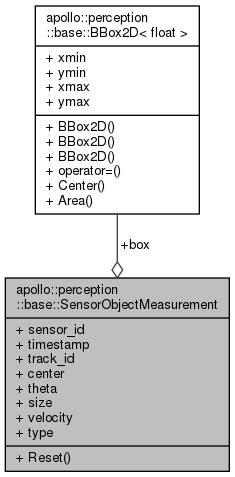
◆ Reset()
| void apollo::perception::base::SensorObjectMeasurement::Reset |
( |
| ) |
|
|
inline |
◆ box
| BBox2D<float> apollo::perception::base::SensorObjectMeasurement::box |
◆ center
| Eigen::Vector3d apollo::perception::base::SensorObjectMeasurement::center = Eigen::Vector3d(0, 0, 0) |
◆ sensor_id
| std::string apollo::perception::base::SensorObjectMeasurement::sensor_id = "unknown_sensor" |
◆ size
| Eigen::Vector3f apollo::perception::base::SensorObjectMeasurement::size = Eigen::Vector3f(0, 0, 0) |
◆ theta
| float apollo::perception::base::SensorObjectMeasurement::theta = 0.0f |
◆ timestamp
| double apollo::perception::base::SensorObjectMeasurement::timestamp = 0.0 |
◆ track_id
| int apollo::perception::base::SensorObjectMeasurement::track_id = -1 |
◆ type
◆ velocity
| Eigen::Vector3f apollo::perception::base::SensorObjectMeasurement::velocity = Eigen::Vector3f(0, 0, 0) |
The documentation for this struct was generated from the following file: