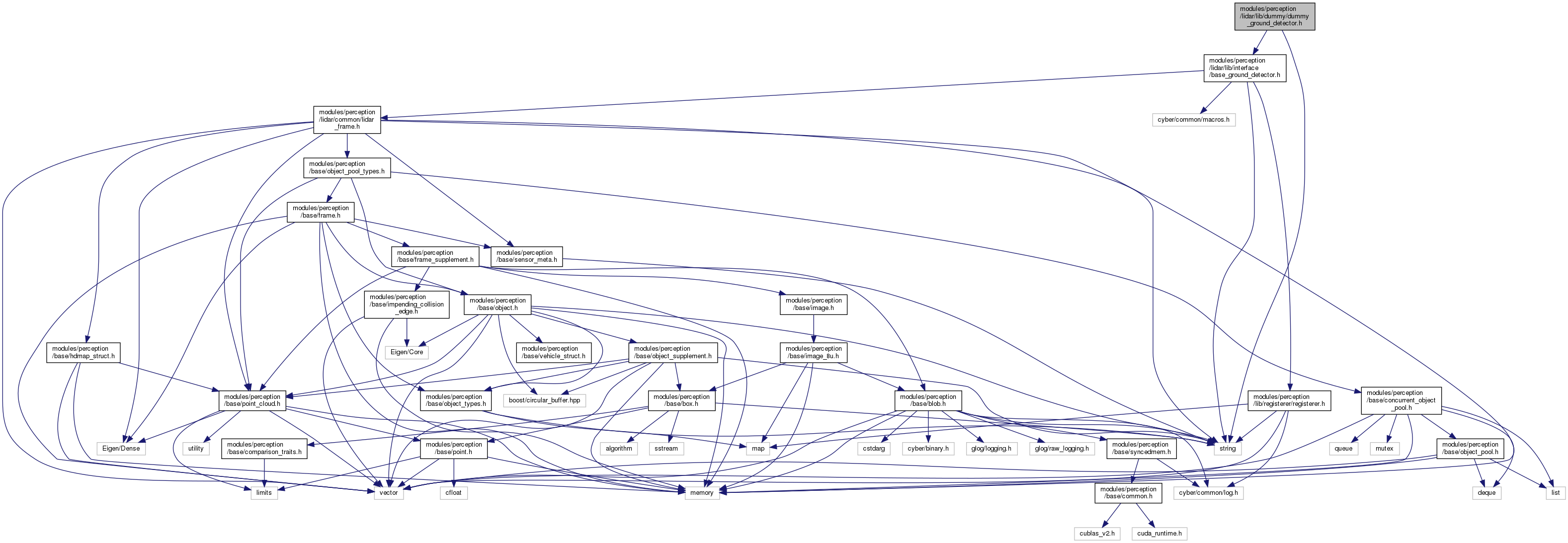
Include dependency graph for dummy_ground_detector.h:
Go to the source code of this file.
Classes | |
| class | apollo::perception::lidar::DummyGroundDetector |
Namespaces | |
| apollo | |
| apollo::perception | |
| apollo::perception::lidar | |
|
Apollo
v5.5.0
Open source self driving car software
|
Go to the source code of this file.
Classes | |
| class | apollo::perception::lidar::DummyGroundDetector |
Namespaces | |
| apollo | |
| apollo::perception | |
| apollo::perception::lidar | |
 1.8.13
1.8.13