#include <omnidirectional_model.h>
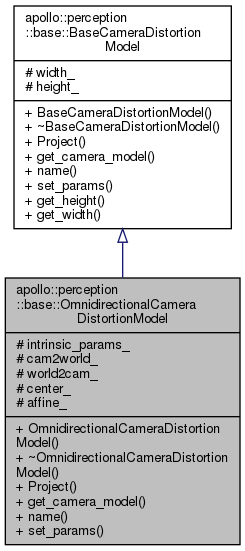
◆ OmnidirectionalCameraDistortionModel()
| apollo::perception::base::OmnidirectionalCameraDistortionModel::OmnidirectionalCameraDistortionModel |
( |
| ) |
|
|
default |
◆ ~OmnidirectionalCameraDistortionModel()
| apollo::perception::base::OmnidirectionalCameraDistortionModel::~OmnidirectionalCameraDistortionModel |
( |
| ) |
|
|
default |
◆ get_camera_model()
| std::shared_ptr<BaseCameraModel> apollo::perception::base::OmnidirectionalCameraDistortionModel::get_camera_model |
( |
| ) |
|
|
overridevirtual |
◆ name()
| std::string apollo::perception::base::OmnidirectionalCameraDistortionModel::name |
( |
| ) |
const |
|
inlineoverridevirtual |
◆ Project()
| Eigen::Vector2f apollo::perception::base::OmnidirectionalCameraDistortionModel::Project |
( |
const Eigen::Vector3f & |
point3d | ) |
|
|
overridevirtual |
◆ set_params()
| bool apollo::perception::base::OmnidirectionalCameraDistortionModel::set_params |
( |
size_t |
width, |
|
|
size_t |
height, |
|
|
const Eigen::VectorXf & |
params |
|
) |
| |
|
overridevirtual |
◆ affine_
| float apollo::perception::base::OmnidirectionalCameraDistortionModel::affine_[3] |
|
protected |
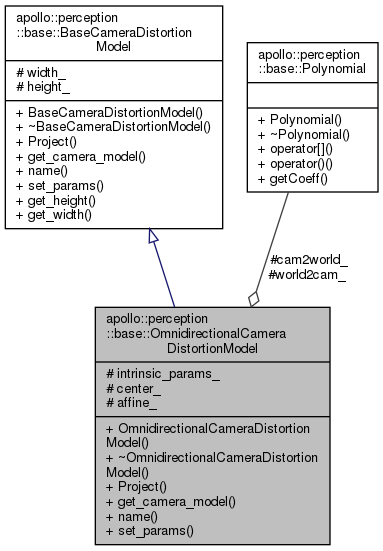
◆ cam2world_
| Polynomial apollo::perception::base::OmnidirectionalCameraDistortionModel::cam2world_ |
|
protected |
◆ center_
| float apollo::perception::base::OmnidirectionalCameraDistortionModel::center_[2] |
|
protected |
◆ intrinsic_params_
| Eigen::Matrix3f apollo::perception::base::OmnidirectionalCameraDistortionModel::intrinsic_params_ |
|
protected |
◆ world2cam_
| Polynomial apollo::perception::base::OmnidirectionalCameraDistortionModel::world2cam_ |
|
protected |
The documentation for this class was generated from the following file:
 Public Member Functions inherited from apollo::perception::base::BaseCameraDistortionModel
Public Member Functions inherited from apollo::perception::base::BaseCameraDistortionModel