#include <lidar_frame.h>
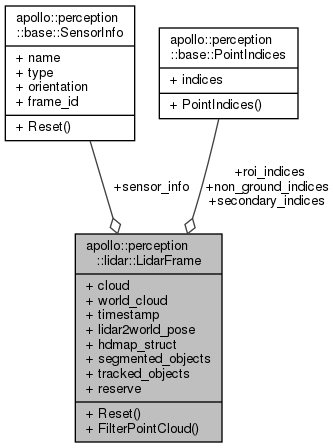
Collaboration diagram for apollo::perception::lidar::LidarFrame:
Public Member Functions | |
| void | Reset () |
| void | FilterPointCloud (base::PointCloud< base::PointF > *filtered_cloud, const std::vector< uint32_t > &indices) |
Public Attributes | |
| std::shared_ptr< base::AttributePointCloud< base::PointF > > | cloud |
| std::shared_ptr< base::AttributePointCloud< base::PointD > > | world_cloud |
| double | timestamp = 0.0 |
| Eigen::Affine3d | lidar2world_pose = Eigen::Affine3d::Identity() |
| std::shared_ptr< base::HdmapStruct > | hdmap_struct = nullptr |
| std::vector< std::shared_ptr< base::Object > > | segmented_objects |
| std::vector< std::shared_ptr< base::Object > > | tracked_objects |
| base::PointIndices | roi_indices |
| base::PointIndices | non_ground_indices |
| base::PointIndices | secondary_indices |
| base::SensorInfo | sensor_info |
| std::string | reserve |
Member Function Documentation
◆ FilterPointCloud()
|
inline |
◆ Reset()
|
inline |
Member Data Documentation
◆ cloud
| std::shared_ptr<base::AttributePointCloud<base::PointF> > apollo::perception::lidar::LidarFrame::cloud |
◆ hdmap_struct
| std::shared_ptr<base::HdmapStruct> apollo::perception::lidar::LidarFrame::hdmap_struct = nullptr |
◆ lidar2world_pose
| Eigen::Affine3d apollo::perception::lidar::LidarFrame::lidar2world_pose = Eigen::Affine3d::Identity() |
◆ non_ground_indices
| base::PointIndices apollo::perception::lidar::LidarFrame::non_ground_indices |
◆ reserve
| std::string apollo::perception::lidar::LidarFrame::reserve |
◆ roi_indices
| base::PointIndices apollo::perception::lidar::LidarFrame::roi_indices |
◆ secondary_indices
| base::PointIndices apollo::perception::lidar::LidarFrame::secondary_indices |
◆ segmented_objects
| std::vector<std::shared_ptr<base::Object> > apollo::perception::lidar::LidarFrame::segmented_objects |
◆ sensor_info
| base::SensorInfo apollo::perception::lidar::LidarFrame::sensor_info |
◆ timestamp
| double apollo::perception::lidar::LidarFrame::timestamp = 0.0 |
◆ tracked_objects
| std::vector<std::shared_ptr<base::Object> > apollo::perception::lidar::LidarFrame::tracked_objects |
◆ world_cloud
| std::shared_ptr<base::AttributePointCloud<base::PointD> > apollo::perception::lidar::LidarFrame::world_cloud |
The documentation for this struct was generated from the following file:
- modules/perception/lidar/common/lidar_frame.h
